汽车前照灯的良好性能,是确保道路及驾驶安全性的关键。道路行驶的环境复杂多变,气候条件、道路照明、行人密度、前方车辆距离、公路或弯道等,都影响着驾驶者的视野。过去只分近光及远光的照明模式,无法依据变化多端的行驶条件改变头灯配光,容易产生照明死角或眩光。
为了提高行车安全与舒适度,近年来,各大汽车制造商纷纷装备了能主动配合道路环境的自适应前照灯系统(AFS - automotive adaptive forward lighting system)。其中,使用MicroLED阵列的前照灯有发光效率高及配光灵活的优势,是智能车灯发展的主流之一。
此篇测量应用将探讨测量MicroLED车灯阵列的特点,並介绍IS光测系统的测量解决方案。
\\ 1. 待测物:MicroLED 汽车车灯阵列
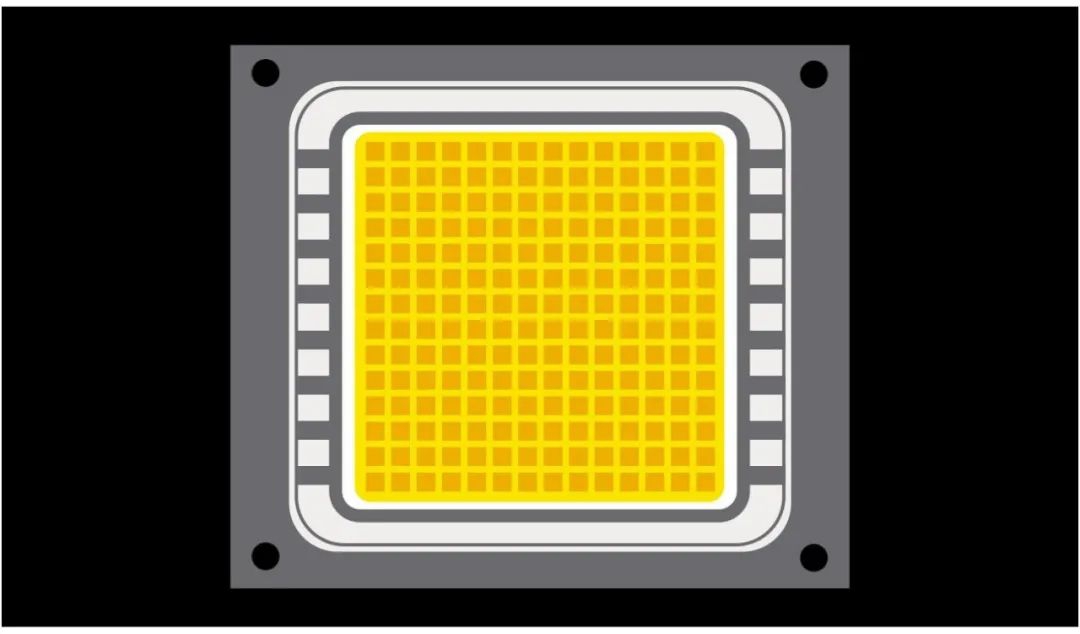
自适应前照灯系统可以根据车辆行驶环境来动态调整光输出模式。例如在光锥中侦测到对向来车时,自动调暗对其的灯光照射,防止驾驶被眩晕。近期的前照灯采用超过1000个像素的MicroLED阵列作为光源。由于每个像素都可以单独控制,因此能实现更精细的光束控制(图1)。这类"数位头灯"甚至能在道路上实现投影(图2)。
▲ 图1 : 用于AFS 的MicroLED 阵列示意图。

▲ 图2 : 数位光源可在道路上投影。(图像来源:Mercedes-Benz)
\\ 2. MicroLED 阵列车灯的测量要求和挑战
为了精确控制车灯质量,必须能测量单个LED的均匀性、亮度及色彩,並定位阵列中的单颗LED缺陷。
测量高功率LED的主要难题,是LED通电时会自发热,进而造成光输出下降及颜色漂移(图3)。
▲ 图3 : 白光LED通电后亮度(红色)和色温(蓝色)的典型漂移。
-
-
测量程序与电源同步,在LED通电的瞬间便进行量测。
传统的单颗LED 逐步测量法,对集成1000 多颗MicroLED 的矩阵来说过度耗时(方法A)。如使用基于摄像机的二维测量系统,则可以同时测量所有LED,测量速度提高许多(方法B)。但此方法需要高水平的测量系统,来达成测量MicroLED 所需的精度。
| 测量方法 |
A: 单一测量法,
每颗LED分开测量
|
B: 二维测量法,
LED阵列一次测量完成
|
系统
|
光谱仪与积分球,
一次点燃一颗量测
|
基于摄像机的系统,
通过拍摄一次测量所有LED
|
优点
|
高精度测量LED功率和光谱 |
非常快速地测量LED功率及颜色 |
缺点
|
费时 |
如何实现摄像机采集信息的
高精度是一大挑战
|
\\ 3. 解决方案:LumiTop – 光谱增强的产品成像色度测量系统
LumiTop 系统解决方案结合上述单一测量法及二维测量法的优点,並克服了高功率LED 的发热问题。

LumiTop 2D 测量系统包含LumiTop 4000 成像色度仪及CAS 140D 高精度光谱仪,两者通过光纤连接(图4)。集成分光器的设计,使RGB 相机和光谱仪可以同步量测。如图5所示,光谱仪从待测物的中心点采集高精度的光谱信息,成像色度仪则同时测量整个LED 阵列,再以光谱信息为参考基准调整参数,从而提高整个二维图像的测量准确性。
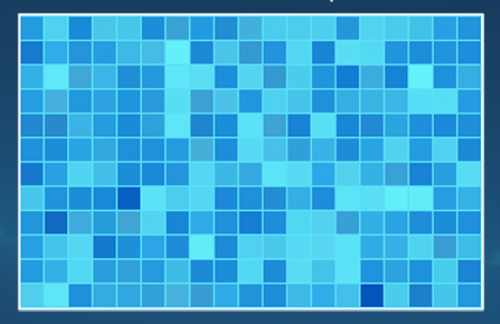
根据修正后的二维测量数据,可有效评估整个LED 阵列的均匀度、亮度和单个LED 的颜色,並精准地找出LED 缺陷(图6)。LumiTop 测量系统是根据亮度(cd/m2)校准,这也是测量二维发射器发光特性的标准。
传统的二维摄像机基于彩色滤光片,需要至少三次的连续颜色测量(红、绿、蓝)。此测量方法通常费时数秒,而测量时因为LED 不停发热,颜色、光强一直处于变化状态,导致测量结果不准确。
我们研发的LumiTop 系统,可以通过一次拍摄所有的颜色通道,解决LED 的发热问题。该系统使用RGB 摄像机,並搭载拜尔滤色镜,能实现毫秒级速度的二维颜色测量。因此,LumiTop系统也适合用于生产制程的在缐测试。通过硬件触发源,LumiTop 可以在LED 通电的同时摄像,在LED发热前就已完成量测。
除了温度上的挑战,LumiTop系统还克服了测量精度上的挑战。为了达到测量MicroLED阵列要求的精度,LumiTop与光谱辐射计相配合,将摄像机的测量结果校正至精确水平(图4)。测量系统的校准(Absolute System Calibration)是此解决方案能确保高精度的关键:Instrument Systems的每套系统在发货前,都经过我们ISO 17025 认证测试实验室的精度验证。
基于其仪器设计、精度、速度和分辨率,带100mm镜头的LumiTop 4000适合用于实验室的LED阵列测量或AFS应用的生产在缐测试。